def projection(v,u):
return ((v*u)/(u*u))*u
|
|
def SupportC(D,p,r):
d=(1/abs(D))*D
return p+r*d
|
|
def SupportV(D,points):
x=vector(points[0])
for i in range(len(points)):
if(x*D<vector(points[i])*D):
x=vector(points[i])
return x
|
|
def Support(D,p,r):
d=(1/abs(D))*D
return p+r*d
|
|
def DoSimplex(points,D):
O=vector([0,0])
if len(points)==1:
D=O-points[0]
if len(points)==2:
if (points[0]-points[1])*(O-points[1])<0:
D=O-points[1]
points=[points[1]]
else:
D=(O-points[1]-projection(O-points[1],points[0]-points[1]))
if len(points)==3:
V1=points[0]-points[2]
V2=points[1]-points[2]
if vector([V1[1],-V1[0]])*V2>0:
temp=points[0]
points[0]=points[1]
points[1]=temp
V1=points[0]-points[2]
V2=points[1]-points[2]
V0=O-points[2]
if vector([V1[1],-V1[0]])*V0<0:
if (vector([-V2[1],V2[0]])*V0)<0:
return (true,points,D)
if V2*V0>0:
points=[points[2],points[1]]
D=(V0-projection(V0,V2))
else:
if V1*V0>0:
points=[points[2],points[0]]
D=(V0-projection(V0,V1))
else:
points=[points[1]]
D=V0
else:
if V1*V0>0:
points=[points[2],points[0]]
D=(V0-projection(V0,V1))
else:
if V2*V0>0:
points=[points[2],points[1]]
D=(V0-projection(V0,V2))
else:
points=[points[0]]
D=V0
if D==O:
return (true,points,D)
else:
return (false,points,D)
|
|
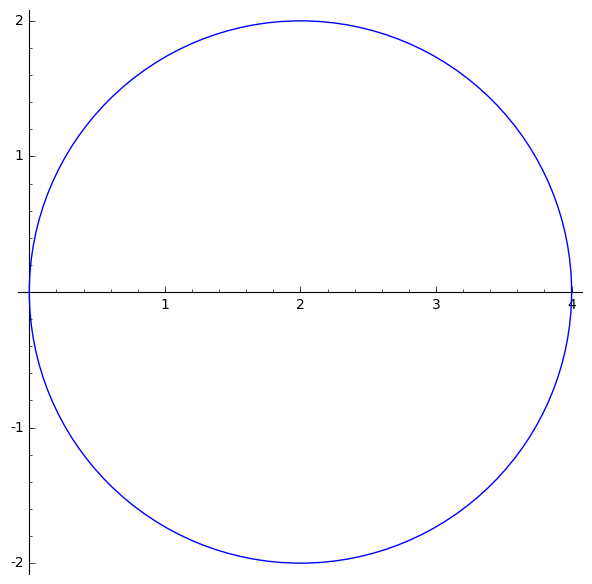
def GJK(p,r):
c=circle(p,r)
O=vector([0,0])
D=vector([0,1])
S=n(SupportC(D,p,r))
points=[S]
plotlist=[scatter_plot(points)+c]
D=-S
count=0
while count<1000:
A=SupportC(D,p,r)
points.append(A)
if len(points)==1:
plotlist.append(scatter_plot(points)+c)
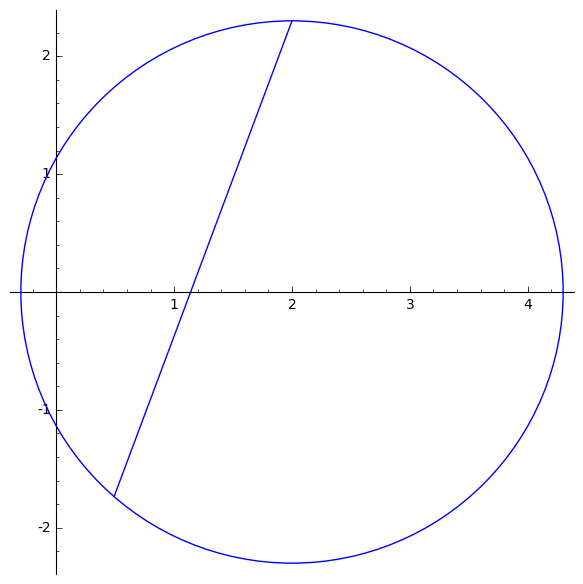
if len(points)==2:
plotlist.append(line(points)+c)
if len(points)==3:
plotlist.append(polygon(points)+c)
if A*D<0:
return (false,plotlist)
k=DoSimplex(points,D)
points=k[1]
D=n(k[2])
if k[0]:
return (true,plotlist)
count=count+1
print(count)
return (false,plotlist)
|
|
def GJKcc(p1,r1,p2,r2):
c=circle(p1-p2,r1+r2)
O=vector([0,0])
D=vector([0,1])
S=n(SupportC(D,p1,r1)-SupportC(-D,p2,r2))
points=[S]
plotlist=[scatter_plot(points)+c]
D=-S
count=0
while count<1000:
A=n(SupportC(D,p1,r1)-SupportC(-D,p2,r2))
points.append(A)
if len(points)==1:
plotlist.append(scatter_plot(points)+c)
if len(points)==2:
plotlist.append(line(points)+c)
if len(points)==3:
plotlist.append(polygon(points)+c)
if A*D<0:
return (false,plotlist)
k=DoSimplex(points,D)
points=k[1]
D=n(k[2])
if k[0]:
return (true,plotlist)
count=count+1
print(count)
return (false,plotlist)
|
|
def GJKvv(v1,v2):
O=vector([0,0])
D=vector([0,1])
S=n(SupportV(D,v1)-SupportV(-D,v2))
points=[S]
plotlist=[scatter_plot(points)]
D=-S
count=0
while count<1000:
A=n(SupportV(D,v1)-SupportV(-D,v2))
points.append(A)
if len(points)==1:
plotlist.append(scatter_plot(points))
if len(points)==2:
plotlist.append(line(points))
if len(points)==3:
plotlist.append(polygon(points))
if A*D<0:
return (false,plotlist)
k=DoSimplex(points,D)
points=k[1]
D=n(k[2])
if k[0]:
return (true,plotlist)
count=count+1
print(count)
return (false,plotlist)
|
|
def GJKcv(p,r,v):
O=vector([0,0])
D=vector([0,1])
S=n(SupportV(D,p,r)-SupportV(-D,v))
points=[S]
plotlist=[scatter_plot(points)]
D=-S
count=0
while count<1000:
A=n(SupportV(D,p,r)-SupportV(-D,v))
points.append(A)
if len(points)==1:
plotlist.append(scatter_plot(points))
if len(points)==2:
plotlist.append(line(points))
if len(points)==3:
plotlist.append(polygon(points))
if A*D<0:
return (false,plotlist)
k=DoSimplex(points,D)
points=k[1]
D=n(k[2])
if k[0]:
return (true,plotlist)
count=count+1
print(count)
return (false,plotlist)
|
|
temp=GJKcc(vector([1,2]),1,vector([-1,2]),1)
list=temp[1]
i=-1
temp[0]
True True |
i=i+1
list[i]
|
i=i-1
list[i]
|
temp=GJKvv([(0,1),(1,1),(1,0),(0,0)],[(0,-1),(1,-1),(1,0),(0,0)])
list=temp[1]
i=-1
temp[0]
True True |
GJKvv([(0,0),(1,1),(1,-1),(2,0)],[(0,0),(1,1),(-1,1),(0,2)])
(True, [Graphics object consisting of 1 graphics primitive, Graphics object consisting of 1 graphics primitive]) (True, [Graphics object consisting of 1 graphics primitive, Graphics object consisting of 1 graphics primitive]) |
i=(1,0)
|
|
D=vector((1,0))
|
|
vector(i)*D
1 1 |
vector((1,0))
(1, 0) (1, 0) |
vector((1,0))*D
1 1 |
|
|